![]()

 AnyBody 應用案例
AnyBody 應用案例
外骨骼型機器人
① 概要
機械外骨骼或稱動力外骨骼(Powered exoskeleton),是一種由鋼鐵的框架構成并且可讓人穿上的機器裝置,這個裝備可以提供額外動力來供四肢運動。應用于康復、護理、搬運重物等領域。
? 本應用案例的目的:在AnyBody中創建支持下肢關節屈曲伸展動作的外骨骼型機器人,進并行步行分析,評估該設備在下肢肌肉運動的起到的作用。

數據 :
? 步行周期:1.2秒
? 被試者的體重:65kg
? 身高:170cm
? 重力:9.81m/s2
② 外骨骼型機器人的模型化
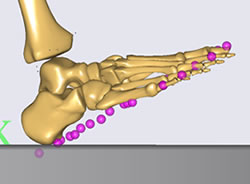 ■ 地面反力
■ 地面反力
該模型中,同時采集了動捕數據與測力臺數據。
如果這個動捕數據直接應用在穿外骨骼的人體模型上,就少考慮了外骨骼的重量,因此地面反力變得不真實,所以不能使用。
那么我們就得找替代方法,AnyBody中有一功能,它可以預測地面反作用力,這個功能叫“GRFPrediction”。
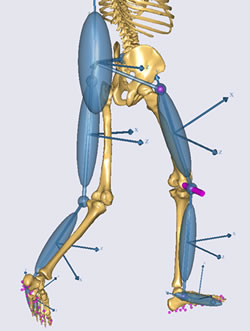 ■ 機器人
■ 機器人
機器人,由7個體節構成,總質量12kg。
另外,作為結合條件,為了不約束人體模型腳的外翻/外旋動作,我們定義了以下Joint。
骨關節:球型鏈接ball joint
膝蓋:ReveluteJoint回轉節
腳踝:球型鏈接ball joint
作為輸入條件定義運動動作并定義約束條件,使人體模型中的行走行為遵循實際行走動作。
 ■ 外骨骼動力
■ 外骨骼動力
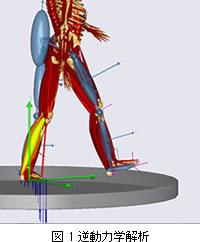
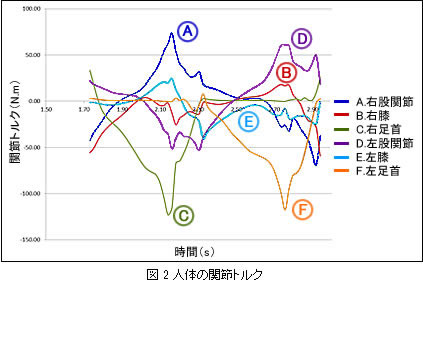
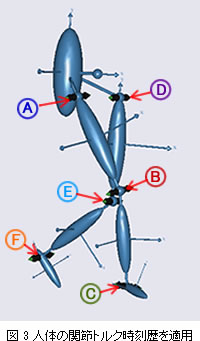
外骨骼動力在關節處以扭矩形式傳遞給人體。為了求出這些扭矩,將不提供動力的外骨骼穿在人體模型上,進行逆動力學分析(圖1)。
這樣就可以得到考慮到外骨骼質量的人體關節扭矩。(圖2)
然后,再把這些扭矩應用在外骨骼關節處。(圖3 )
② 結果
 右側的動畫是開啟外骨骼動力后的步行分析。
右側的動畫是開啟外骨骼動力后的步行分析。
未穿外骨骼時,腓腸肌處明顯可以看到肌肉的激活度比較高,但開啟動力后腓腸肌的激活度降低不少,顯示為正常水平。

對比兩組肌肉激活度。開啟外骨骼動力時腓腸肌最大值從38%下降到10%。
? 而且,整體的肌肉動員模式發生了變化,腓骨肌成為主要肌肉,而不是腓腸肌。另外,從圖中的2.4 ~ 2.6秒的時間來看,有些肌肉受外骨骼的影響幾乎不活動。雖然沒有圖示,但關節的反力也有相同下降的效果。
?
 雖然使用了理想的外骨骼動力,但是可以看到,右腿的肌肉活動量并沒有變為零。那是因為沒有支持腿部關節的外翻/外旋的動作。
雖然使用了理想的外骨骼動力,但是可以看到,右腿的肌肉活動量并沒有變為零。那是因為沒有支持腿部關節的外翻/外旋的動作。
③ 總結
通過分析可以推測肌肉調用(肌肉的用法)和肌肉激活度(或人體的反應)。
AnyBody對設計有以下幫助:
?模型可以自由化
?冗余系統的無縫對接
?已驗證的地面反力推測功能
?大量的人體模型驗證研究其計算時間較短
此外,可以使用AnyBody進行以下分析:
外骨骼/人體交互型建模
外骨骼動力或工作的模式的驗證
分析不同模式分析,如肌肉缺失情況(殘疾人)
步行以外的動作或更復雜工作的類型
這極大地幫助設計者理解外骨骼在人體運動中的作用和影響,發現潛在問題,進行相應的優化。